Christine Agethen
A Hierarchical Control Architecture for ω-Languages
Reihe: FAU Forschungen : Reihe B
In the Supervisory Control Theory according to P.J. Ramadge und W.M. Wonham, the behaviour of a dynamical system is described by sequences of discrete events. Typical applications are production and transportation systems that are operated by programmable logic controllers. A challenge in this area is the controller design for systems consisting of a large number of components and requiring the coordination of various synchronous processes. The size of a model that describes their synchronous behaviour grows exponentially in the number of components. Hence, monolithic supervisor design using the Supervisory Control Theory in the context of large-scale systems requires a prohibitive amount of computational effort. In order to avoid large monolithic models, several hierarchical and modular procedures have been presented that structure the monolithic control problem vertically and horizontally into manageable synthesis sub-tasks. However, existing approaches are limited to modelling behaviours on a finite-time horizon, using *-languages. Whereas synthesis procedures of the monolithic controller design also include the controller design for behaviours that evolve on an infinite-time axis, so called ω-languages, offering thereby a more general field of application.
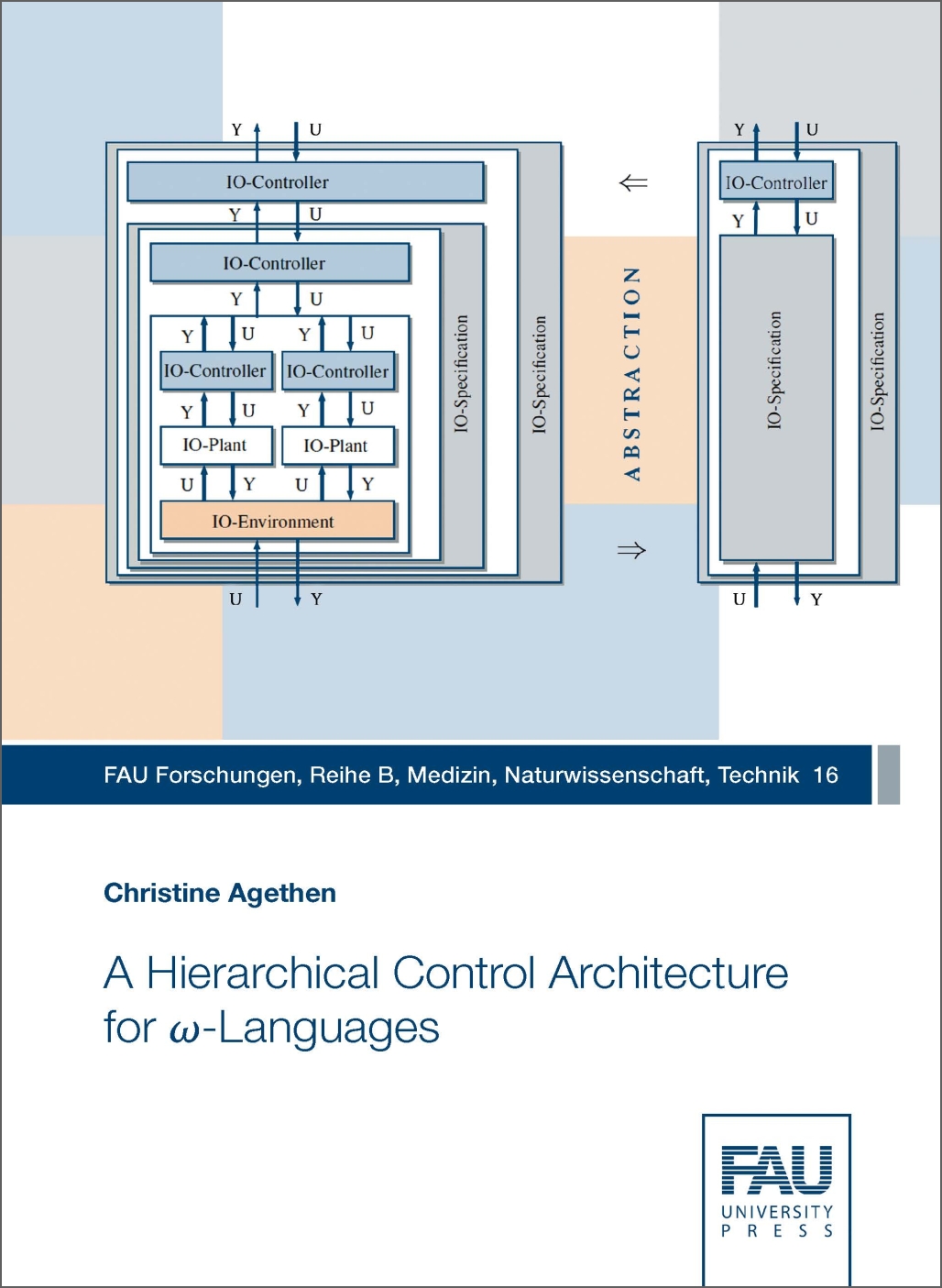
In this thesis, a hierarchical and modular control approach for ω-languages is developed that is based on the use of abstractions. Therefore, known methods regarding the monolithic controller design for ω-languages are adopted to the hierarchical and modular control context. In addition, dynamical systems are modelled as input/output systems, following the Behavioural Systems Theory of J.C. Willems. For a practical perspective, algorithms to solve the presented hierarchical control problem on the basis of finite-state automata are elaborated and an example from the area of transportation systems is discussed. It demonstrates that the presented approach enables efficient controller design for large-scale systems modelled by ω-languages and reduces the respective computational effort.
Produktinformationen
Paperback121 Seiten , Format 17,0 x 24,0
FAU University Press
23,00 € inkl. MwSt.
Erscheinungsdatum
April 2017
Kategorie: Technik