Jan-Erik Moseberg
Regelung der Horizontalbewegung eines überaktuierten Fahrzeugs unter Berücksichtigung von Realisierungsanforderungen
Reihe: FAU Studien aus der Elektrotechnik
Aktuelle Entwicklungen im Automobilbereich motivieren die Betrachtung von Kraftfahrzeugen, deren vier Räder separat angetrieben, gebremst und gelenkt werden können. In Bezug auf die Fahrzeugbewegung besitzen diese redundante Stelleingriffe, welche es der Steuerung und Regelung ermöglichen, sekundäre Optimierungsziele neben der Realisierung eines geforderten Bewegungsverhaltens zu verwirklichen.
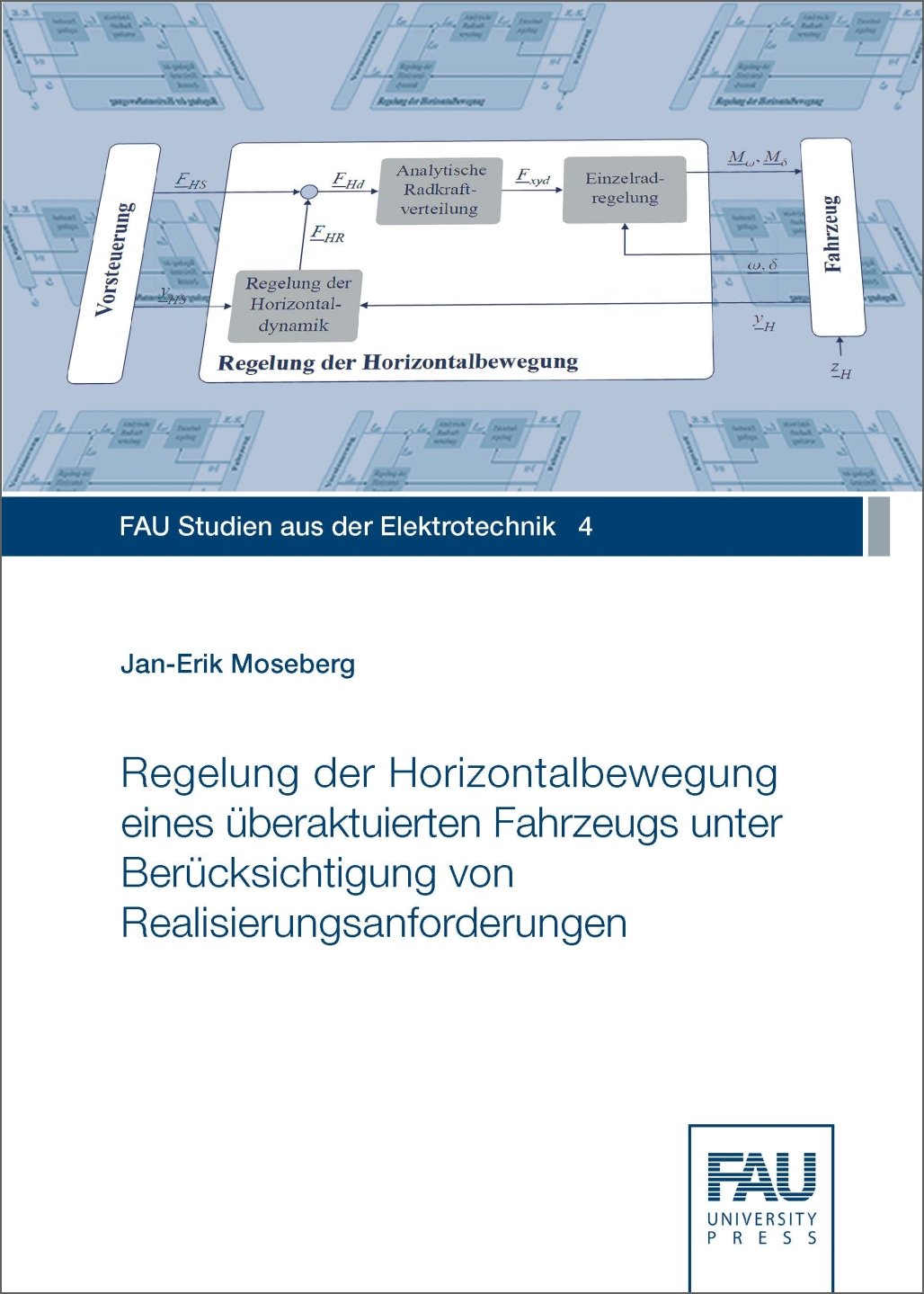
Die vorliegende Arbeit befasst sich in diesem Kontext mit dem Entwurf und der Analyse einer integrierten Vorsteuerungs- und Regelungsstruktur für die Horizontalbewegung solch überaktuierter Fahrzeuge. Um die regelungstechnischen und fahrdynamischen Zielstellungen unter gleichzeitiger Berücksichtigung anwendungsrelevanter Randbedingungen zu realisieren, ist eine modulare Zwei-Freiheitsgrade-Struktur gewählt. Im Bereich der Raddynamikregelung kommt dabei ein neuartiger Ansatz zur Stabilisierung der Raddrehzahlen bzw. der Radlenkwinkel zum Einsatz, welcher ein Blockieren, Durchdrehen oder Querstellen der Räder stationär vermeidet. Die Überaktuierung der Fahrzeugbewegung dient der Erhöhung der Fahrsicherheit, indem die Kraftschlussausnutzungen zwischen den vier Reifen und der Fahrbahn analytisch verringert werden, sodass annähernd das fahrdynamische Optimum erreicht wird. Darüber hinaus wird die Redundanz der Stelleingriffe dazu genutzt, die funktionale Sicherheit des Gesamtfahrzeugs bei Vorhandensein fehlerhafter Stellglieder zu gewährleisten.
Produktinformationen
Paperback190 Seiten , Format 17,0 x 24,0
FAU University Press
19,00 € inkl. MwSt.
Erscheinungsdatum
Juli 2016
Kategorie: Technik