Maximilian Gaukler
Safety Verification of Real-Time Control Systems with Flexible Timing
Reihe: FAU Studien aus der Elektrotechnik
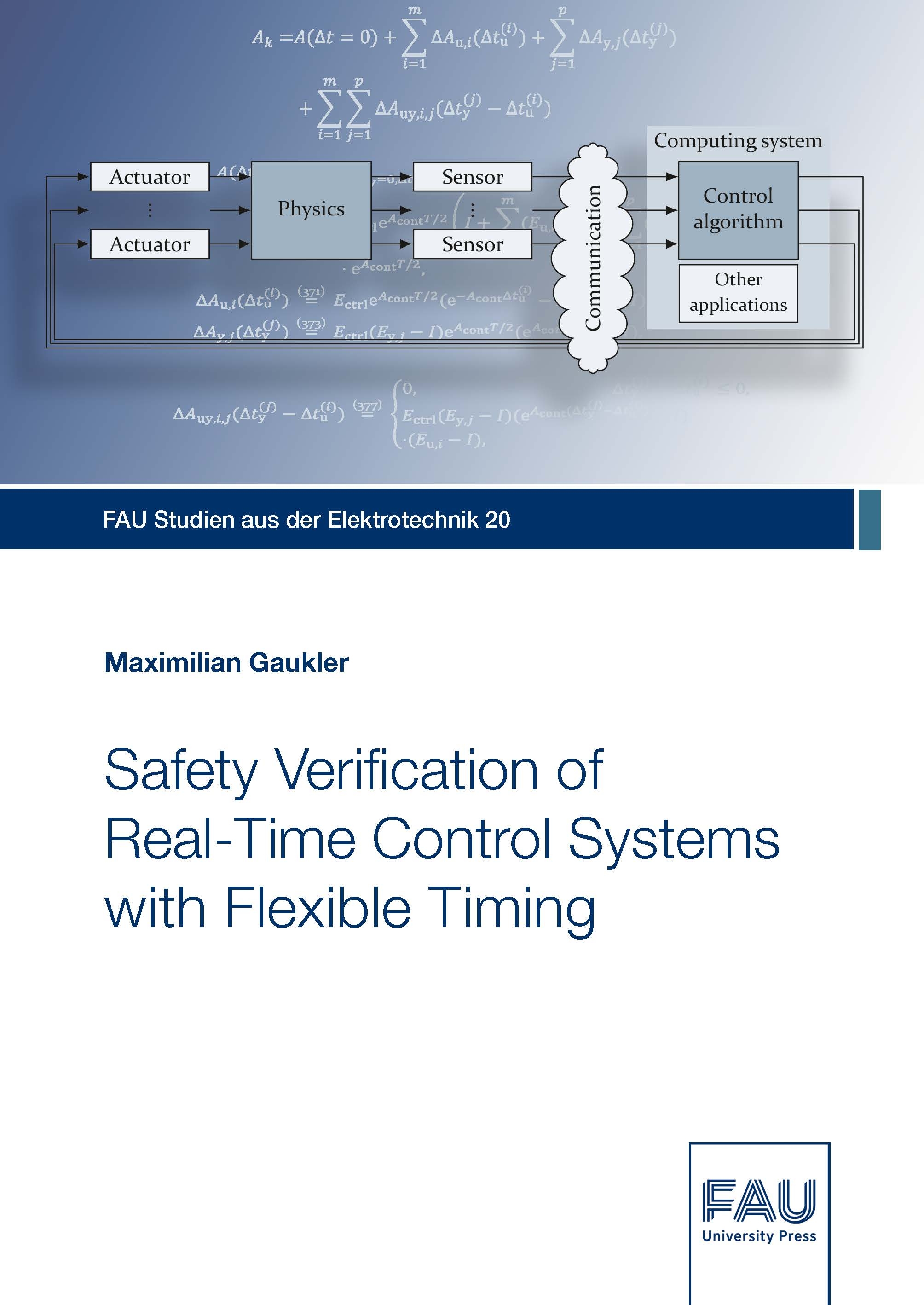
The topic of this work is the analysis of control loops under the influence of input/output timing deviations. Such deviations from the ideal periodic timing can lead to increased control error or even to instability. To address this issue, methods are presented to determine a safe tolerance band for the timing deviation. Two alternatives are addressed: stability analysis at design time and timing adaptation at run time. In both cases, the methods support multiple inputs and outputs with individual timing uncertainties.
For the analysis at design time, the work presents methods to determine stability and maximal control error at design time for a given input/output time window. The linear case is analyzed using linear impulsive systems. Progress towards solving the nonlinear case is made by reachability analysis of hybrid automata in connection with the Continuization method.
For a flexible adaptation at run time, the framework of convergence rate abstractions is developed. By this, the decision about the permissible input/output timing can be made according to the current situation and with little computational overhead. Hence, larger temporal deviations can be permitted for a short time as long as the timing remains good enough in the long-term average to preserve stability.
Die Arbeit befasst sich mit dem Verhalten von Regelkreisen unter dem Einfluss von zeitlichen Abweichungen der Ein- und Ausgabe. Solche Abweichungen von einem idealen periodischen Zeitraster können zu größerer Regelabweichung und bis hin zu Instabilität führen. Die Arbeit stellt Methoden vor, um ein erlaubtes Toleranzband für die zeitliche Abweichung zu bestimmen. Dies umfasst zum einen die Stabilitätsanalyse zum Entwurfszeitpunkt und zum anderen die Adaption zur Laufzeit. Insbesondere wird der Mehrgrößenfall betrachtet, in dem mehrere Sensoren und Aktoren jeweils eigene zeitliche Unsicherheiten aufweisen.
Für die Analyse zum Entwurfszeitpunkt werden Methoden zur die Analyse der Stabilität und maximalen Regelabweichung für ein gegebenes Ein-/Ausgabe-Zeitfenster vorgestellt. Für den linearen Fall wird dies anhand eines linear impulsives Systemmodells umgesetzt. Als Lösungsweg für den nichtlinearen Fall wird die Erreichbarkeitsanalyse hybrider Automaten in Vebrindung mit der Continuzation-Transformation untersucht.
Zum anderen wird eine Methode zur flexiblen Anpassung der Ein-/Ausgabe-Zeitfenster an die aktuelle Situation entwickelt. Hierzu wird das Konzept der Konvergenzraten-Abstraktion entwickelt, um zur Laufzeit mit mit geringem Rechenaufwand eine Entscheidung über das zulässige Zeitfenster zu treffen. Somit kann kurzzeitig eine größere zeitliche Abweichung zugelassen werden, solange das durchschnittliche Timing hinreichend gut bleibt um die Stabilität zu erhalten.
Produktinformationen
293 Seiten , Format 17,0 x 24,0FAU University Press
Paperback
32,50 € inkl. MwSt.
Erscheinungsdatum
April 2023
Kategorie: Technik